Ohad ben-Shahar
Few words about selected projects I have worked on in the past
1. Structural Organization and saliency via Dimension Analysis (1998)
If things are shaped, may we conclude that the framework is not?
[Kurt Koffka, 1935]
 When looking outdoors, do we get visually confused when the window is covered with a screen?
Do we struggle to separate line graffiti from brick walls?
Do we have visual difficulties when it is raining?
Questions such as these all relate to the fundamental ability of our visual system to
separate structure from structure even if they overlap and even without a priori knowldge
on the scene. Indeed, kind of figure ground separation, the need to separate structures,
or to organize "atomic" structures into classes,can be viewed as a generalization of
the common notions of figure ground and saliency which generally is defined
in terms of a extracting regularity embedded in noise.
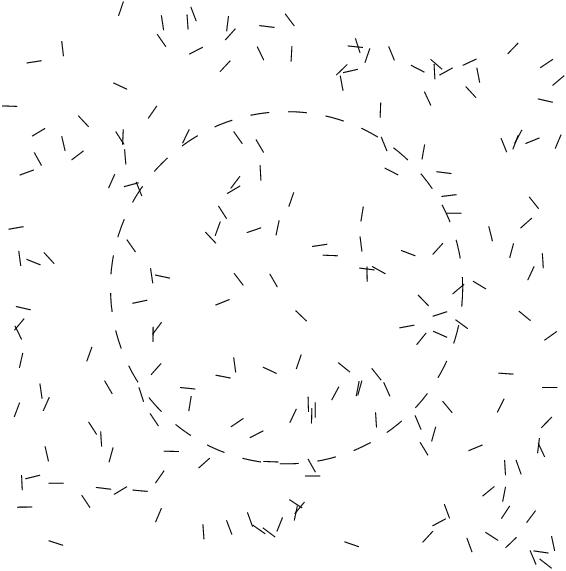
In this context what is salient relates to good continuation, regularity, length,
and smoothness (far right image). However, in a different setup what is the longest, smothest, least curving
and most regular, may be the least salient (e.g., the straight lines of the grating in the left image). What is going on?
When looking outdoors, do we get visually confused when the window is covered with a screen?
Do we struggle to separate line graffiti from brick walls?
Do we have visual difficulties when it is raining?
Questions such as these all relate to the fundamental ability of our visual system to
separate structure from structure even if they overlap and even without a priori knowldge
on the scene. Indeed, kind of figure ground separation, the need to separate structures,
or to organize "atomic" structures into classes,can be viewed as a generalization of
the common notions of figure ground and saliency which generally is defined
in terms of a extracting regularity embedded in noise.
In this context what is salient relates to good continuation, regularity, length,
and smoothness (far right image). However, in a different setup what is the longest, smothest, least curving
and most regular, may be the least salient (e.g., the straight lines of the grating in the left image). What is going on?
In this project we tried to avoid the question of saliency per se and concentrate on separating
the stimulus into primitive structures (primitive in the sense of perceptual organization).
Saliency then becomes a decision process on the groups of atomic structures and their interaction.
The basic question is what is atomic and how can it be extracted with minimal knowledge.
Extending work on visual complexity [Dubuc 1995], we have used fractal dimension in a high dimensional
space (one that makes the local geometry explicit) to represent, measure, and classify structure into few
atomic classes. One such classification is demonstrated here. Other examples are in the
demos page.
|
Stimulus [Galli and Gama, 1931]
|

|

|

|

|

|
| Dust |
Curves |
Flow |
Turbulence |
1. Manipulation planning for mobile robots (1996)
 In the old days of my masters program I have done some work in robot manipulation planning.
Since I was intrigued by mobile robots and sought manipulation that requires no additional
actuators, I converged to something any mobile robot can do, namely... pushing. And since
maniupulation planning is a very hard problem (very as in PSPACE-hard), I was studying ways
to do practical manipulation planning for many movable objects, mostly by exploiting ordering
constrints between the different actions that the agent can take. Unlike rigid manipulations, pushing
is irreversable and thus if you don't plan ahead carefuly, you can definitely push your objects to an
absolute dead end (the simplest example is pushing an object to a corner). Thus, planning in this case
is a tricky business.
In the old days of my masters program I have done some work in robot manipulation planning.
Since I was intrigued by mobile robots and sought manipulation that requires no additional
actuators, I converged to something any mobile robot can do, namely... pushing. And since
maniupulation planning is a very hard problem (very as in PSPACE-hard), I was studying ways
to do practical manipulation planning for many movable objects, mostly by exploiting ordering
constrints between the different actions that the agent can take. Unlike rigid manipulations, pushing
is irreversable and thus if you don't plan ahead carefuly, you can definitely push your objects to an
absolute dead end (the simplest example is pushing an object to a corner). Thus, planning in this case
is a tricky business.
 Shown here (top right images) are two examples of pushing plans. One simulation for 8 movable boxes of (2 DOF each)
that needs to be rearranged within a very tight work space and the other of one movable object of 3 DOF
that needs to be pushed to a final configuration within a very cluttered work space. Click on the images
to see the plans execute (WARNNING: these are pretty large animated gif files. Don't try it unless you have
broad band). Each clip shows the
goal configuration on the right hand side of the screen and the actual plan on the left.
Check some other clips in my demos page, were you can also find mpeg versions
with smaller file size.
Shown here (top right images) are two examples of pushing plans. One simulation for 8 movable boxes of (2 DOF each)
that needs to be rearranged within a very tight work space and the other of one movable object of 3 DOF
that needs to be pushed to a final configuration within a very cluttered work space. Click on the images
to see the plans execute (WARNNING: these are pretty large animated gif files. Don't try it unless you have
broad band). Each clip shows the
goal configuration on the right hand side of the screen and the actual plan on the left.
Check some other clips in my demos page, were you can also find mpeg versions
with smaller file size.
Finally, we have experimented with actual pushing using a point pusher and a basic
action/reaction model for one movable object. The clip on the left shows how such a pusher
completes a task of pushing a box around a corner.
- O. Ben-Shahar and Ehud Rivlin (1998),
Practical Pushing Planning for Rearrangement Tasks,
IEEE Transaction on Robotics and Automation,
14(4) 549-565, 1998.
- O. Ben-Shahar and Ehud Rivlin (1998),
To Push or not to Push: On the Rearrangement of Movable objects by a Mobile Robot ,
IEEE Transaction on Systems, Man, and Cybernetics,
28(5) 667-679, 1998.
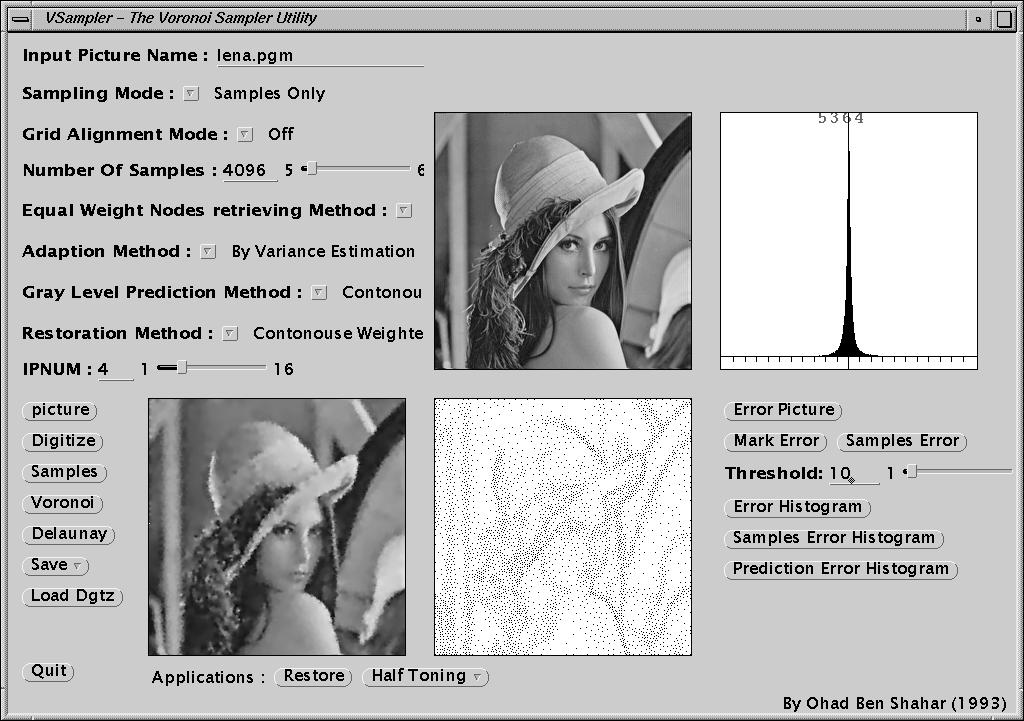
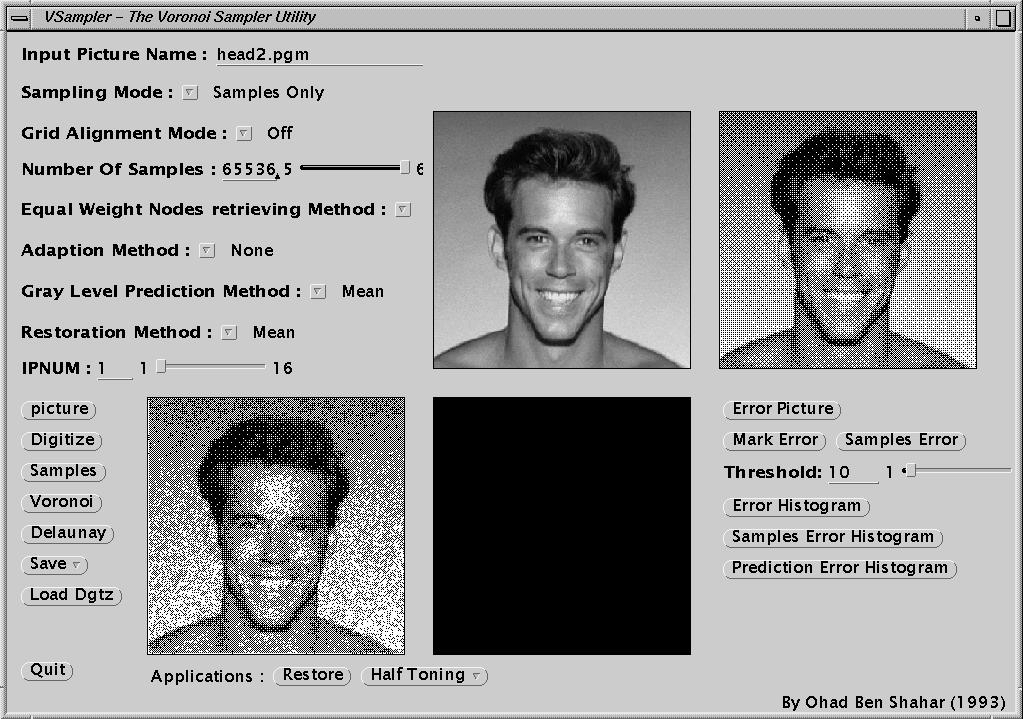
2. Vsampler - Adaptive farthest point sampler for image compression (1994)
 Based on a novel method of "Farthest Point Strategy",
a general purpose tool for image sampling, compression and interpolation is developed.
The algorithm, which uses the Voronoi diagram, achieves a deterministic
progressive image acquisition that retains uniformity with the increased density.
The uniformity metric can be either image-independent or image-dependent so
an adaptive sampling scheme can be derived too.
The samples are irregularly spaced, providing excellent antialiasing properties.
The sampled gray levels subset can serve as a compressed representation of the image,
and various interpolation techniques were tested and evaluated for the image reconstruction.
The developed tool, Vsampler, can be used for various
applications and has already been used for
image compression,
image halftoning,
and ray-tracing process (see below).
Based on a novel method of "Farthest Point Strategy",
a general purpose tool for image sampling, compression and interpolation is developed.
The algorithm, which uses the Voronoi diagram, achieves a deterministic
progressive image acquisition that retains uniformity with the increased density.
The uniformity metric can be either image-independent or image-dependent so
an adaptive sampling scheme can be derived too.
The samples are irregularly spaced, providing excellent antialiasing properties.
The sampled gray levels subset can serve as a compressed representation of the image,
and various interpolation techniques were tested and evaluated for the image reconstruction.
The developed tool, Vsampler, can be used for various
applications and has already been used for
image compression,
image halftoning,
and ray-tracing process (see below).
- Project information sheet, Center for Intelligent Systems, Technion. Israel, 1994.
Download ps.gz (184K).
- Y. Eldar, M. Lindenbaum, M. Porat and Y. Y. Zeevi (1994),
The Farthest Point Strategy for Progressive Image Sampling,
In the Proceedings of the IEEE Internationl conference on Pattern Recognition ,
1994.
- I. Notkin and C. Gotsman (1994),
Parallel Adaptive Ray-Tracing,
CIS Report No. 9416, Technion - IIT, Israel, 1994.
|




{kind=link}